
При разработке грунта скреперами для их управления используют аппаратуру типа «Копир-Стабилоплан-10Л», оснащенную лазерным устройством, которая обеспечивает точную планировку под заданные отметки и получение различных уклонов поверхности при резании грунта. В состав аппаратуры (рисунок 9.13) входят электрогидрораспределитель 1, пульт с блоком управления 2, фотоприемное устройство 3 и датчик углового положения рамы скрепера 4.
В этой системе автоматическая стабилизация положения ножей скрепера также осуществляется в двух вариантах: с помощью датчика углового положения 4 (ДКБ) или по лучу лазера (от лазерного нивелира 7).
Датчик (ДКБ) устанавливают на балке рамы скрепера. Он предназначен для преобразования перемещения собственного корпуса относительно вертикали в электрический сигнал, передаваемый после усиления и замера рассогласования на исполнительный механизм, т.е. на гидроцилиндры.

В копирном режиме управления система также обеспечивает непрерывную стабилизацию положения ножей скрепера по высоте. Работа этой системы не отличается от работы лазерного оборудования бульдозера и осуществляется с помощью фотоприемного устройства 3. Его устанавливают в передней части ковша для контроля положения его режущей кромки относительно лазерной плоскости, получаемой с помощью нивелира 5.
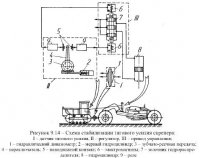
Стабилизация тягового усилия может осуществляться автоматически. Схема этого варианта стабилизации представлена на рисунке 9.14 (на примере прицепного скрепера). Она включает датчик тягового усилия I, регулятор II и привод управления III. Объектом регулирования является рабочий орган машины — ковш. Его положение определяет значение независимого параметра регулирования — толщины срезаемой стружки грунта, от которого зависит величина нагрузки и, как следствие, — тяговое усилие. При работе скрепера тяговое усилие при помощи гидравлического динамометра 1 преобразуется в перемещение штока мерного гидроцилиндра 2, который через зубчато-реечную передачу 3 вращает вал переключателя 4. Если сопротивление грунта соответствует тяговому усилию скрепера, переключатель расположен в нейтральном положении (как показано на схеме). С увеличением или снижением нагрузки на ковш переключатель замыкает один из неподвижных контактов 5, в результате чего срабатывает одно из двух реле 9, воздействующее на соответствующий электромагнит 6. Электромагнит, в свою очередь, перемещает золотник гидрораспределителя 7 вверх или вниз и включает гидроцилиндр 8, который выглубляет или заглубляет ковш.
